

Recent interesting robotics papers
HIL-SERL: Precise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement Learning
- sparse reward classifier
- human in the loop online RL training
#arxiv #RL
Project Website
- sparse reward classifier
- human in the loop online RL training
#arxiv #RL
Project Website
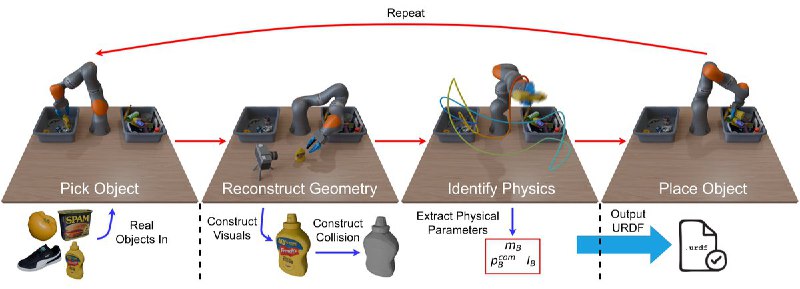
Scalable Real2Sim: Physics-Aware Asset Generation Via Robotic Pick-and-Place Setups
- automatically generated simulation objects from the real world
- detailed analysis of object parameter estimation procedure
#arxiv #real2sim #reconstruction
X Overview, Project Website
- automatically generated simulation objects from the real world
- detailed analysis of object parameter estimation procedure
#arxiv #real2sim #reconstruction
X Overview, Project Website
Visuomotor Policies to Grasp Anything with Dexterous Hands
- grasping based on stero input
- engineering example of teacher-student, sim2real, and geometric fabrics
#arxiv #dexterous #grasp #sim2real
X Overview, Project Website, Geometric Fabrics
- grasping based on stero input
- engineering example of teacher-student, sim2real, and geometric fabrics
#arxiv #dexterous #grasp #sim2real
X Overview, Project Website, Geometric Fabrics
GraspVLA: a Grasping Foundation Model Pre-trained on Billion-scale Synthetic Action Data
- combination of sim and real could help train robust grasping policy
- engineering example of pi-0 policy (VLM + flow matching)
#arxiv #grasp #simulation #sim2real #flow_matching
X Overview, Project Website, NVidia GraspGen
- combination of sim and real could help train robust grasping policy
- engineering example of pi-0 policy (VLM + flow matching)
#arxiv #grasp #simulation #sim2real #flow_matching
X Overview, Project Website, NVidia GraspGen

FALCON: Learning Force-Adaptive Humanoid Loco-Manipulation
- combines upper and lower body for policy training
- curriculum training for force adaptation
#arxiv #humanoid #locomanip
X Overview, Project Website
- combines upper and lower body for policy training
- curriculum training for force adaptation
#arxiv #humanoid #locomanip
X Overview, Project Website
Steerable Scene Generation with Post Training and Inference-Time Search
- use a diffusion-based framework to generate scalable scenes on procedural data
- use a Monte Carlo Tree Search to find physical feasibility and satisfy downstream objective
#arxiv #diffusion #generative
X Overview, Project Website
- use a diffusion-based framework to generate scalable scenes on procedural data
- use a Monte Carlo Tree Search to find physical feasibility and satisfy downstream objective
#arxiv #diffusion #generative
X Overview, Project Website
TWIST Teleoperated Whole-Body Imitation System
- single network for whole-body control
#arxiv #humanoid
X Overview, Project Website
- single network for whole-body control
#arxiv #humanoid
X Overview, Project Website
PyRoki A Modular Toolkit for Robot Kinematic Optimization
- better performance than cuRobo
- GPU-assisted trajectory optimization toolbox
#arxiv #toolbox #trajopt
X Overview, Project Website
- better performance than cuRobo
- GPU-assisted trajectory optimization toolbox
#arxiv #toolbox #trajopt
X Overview, Project Website
VideoMimic Visual imitation enables contextual humanoid control
- used human video to learn policy for humanoid
- real-to-sim-to-real tendency
#arxiv #real2sim2real #humanoid #reconstruction
X Overview, Project Website
- used human video to learn policy for humanoid
- real-to-sim-to-real tendency
#arxiv #real2sim2real #humanoid #reconstruction
X Overview, Project Website
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
- Combined ABD with IPC and implemented in Warp
- Good implementation of tactile sensor
#arxiv #tactile #warp
X Overview, Project Website
- Combined ABD with IPC and implemented in Warp
- Good implementation of tactile sensor
#arxiv #tactile #warp
X Overview, Project Website
Real-is-Sim: Bridging the Sim-to-Real Gap with a Dynamic Digital Twin for Real-World Robot Policy Evaluation
- Incorporate previous work embodied gaussians as a novel representation of the real world
- using gaussian splatting and warp to reconstruct the scene in simulation
#arxiv #simulation #reconstruction
X Overview, Project Website, Embodied Gaussians
- Incorporate previous work embodied gaussians as a novel representation of the real world
- using gaussian splatting and warp to reconstruct the scene in simulation
#arxiv #simulation #reconstruction
X Overview, Project Website, Embodied Gaussians
PhysTwin: Physics-Informed Reconstruction and Simulation of Deformable Objects from Videos
- utilize scene reconstruction to create digital twin
- using warp as the simulation pipeline
#arxiv #deformable #reconstruction #simulation
X Overview, Project Link, Arxiv Link
- utilize scene reconstruction to create digital twin
- using warp as the simulation pipeline
#arxiv #deformable #reconstruction #simulation
X Overview, Project Link, Arxiv Link
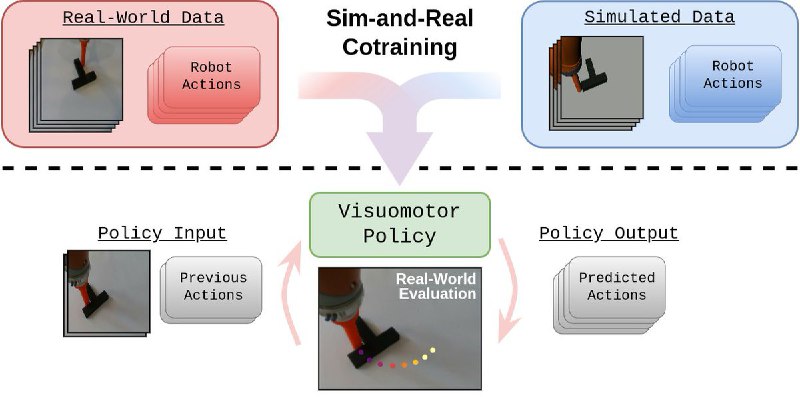
Empirical Analysis of Sim-and-Real Cotraining Of Diffusion Policies For Planar Pushing from Pixels
- detailed analysis of co-training on DP sim-and-real
#arxiv #manipulation
X Overview, Arxiv Link
- detailed analysis of co-training on DP sim-and-real
#arxiv #manipulation
X Overview, Arxiv Link
DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset
- benchmark with precise calibration
- it is mind-blowing to see how modern vision model could help to calibrate automatically
#arxiv #dataset
X Overview, Project Website
- benchmark with precise calibration
- it is mind-blowing to see how modern vision model could help to calibrate automatically
#arxiv #dataset
X Overview, Project Website
π0.5: a VLA with Open-World Generalization
- following work of pi-0
- utilize co-train and use VLM to identify low-level tasks from high-level command
#arxiv #manipulation
X Overview, Project Website, pi-0
- following work of pi-0
- utilize co-train and use VLM to identify low-level tasks from high-level command
#arxiv #manipulation
X Overview, Project Website, pi-0